GridWorld Simulation Framework
Abmarl provides a GridWorld Simulation Framework for setting up grid-based Agent Based Simulations, which can be connected to Reinforcement Learning algorithms through Abmarl’s AgentBasedSimulation interface. The GridWorld Simulation Framework is a gray box: we assume users have working knowledge of Python and object-oriented programming. Using the built in features requires minimal knowledge, but extending them and creating new features requires more knowledge. In addition to the design documentation below, see the GridWorld tutorials for in-depth examples on using and extending the GridWorld Simulation Framework.
Framework Design
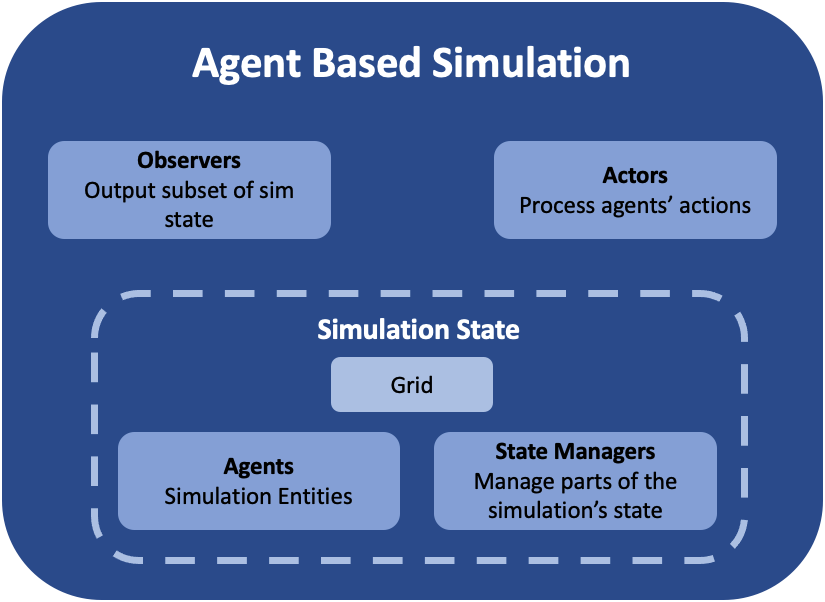
Abmarl’s GridWorld Simulation Framework. A simulation has a Grid, a dictionary of agents, and various components that manage the various features of the simulation. The componets shown in medium-blue are user-configurable and -creatable.
The GridWorld Simulation Framework utilizes a modular design that allows users to create new features and plug them in as components of the simulation. Every component inherits from the GridWorldBaseComponent class and has a reference to a Grid and a dictionary of Agents. These components make up a GridWorldSimulation, which extends the AgentBasedSimulation interface. For example, a simulation might look something like this:
from abmarl.sim.gridworld.base import GridWorldSimulation
from abmarl.sim.gridworld.state import PositionState
from abmarl.sim.gridworld.actor import MoveActor
from abmarl.sim.gridworld.observer import PositionCenteredEncodingObserver
class MyGridSim(GridWorldSimulation):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.position_state = PositionState(**kwargs)
self.move_actor = MoveActor(**kwargs)
self.observer = PositionCenteredEncodingObserver(**kwargs)
def reset(self, **kwargs):
self.position_state.reset(**kwargs)
def step(self, action_dict):
for agent_id, action in action_dict.items():
self.move_actor.process_action(self.agents[agent_id], action)
def get_obs(self, agent_id, **kwargs):
return self.observer.get_obs(self.agents[agent_id])
...
Processing Actions
The GridWorld Simulation Framework architecture defines how the simulation generates (state, action, reward, next state)-tuples used in Reinforcement Learning. In a given step, agents send actions to the simulation. The Actors receive these actions and are responsible to determine if they are legitimate and how they impact the simulation state. For example, an agent may attempt three attacks in one step: one attack on an empty cell, one attack on an enemy agent, and one attack on a friendly agent. If the Actor does not allow “friendly fire”, then only the attack on an enemy would result in a propsed change in state. The Actor sends the propsed state change to the State Component responsible for that part of the state. The State Components apply the changes and ensure that the next state is valid.
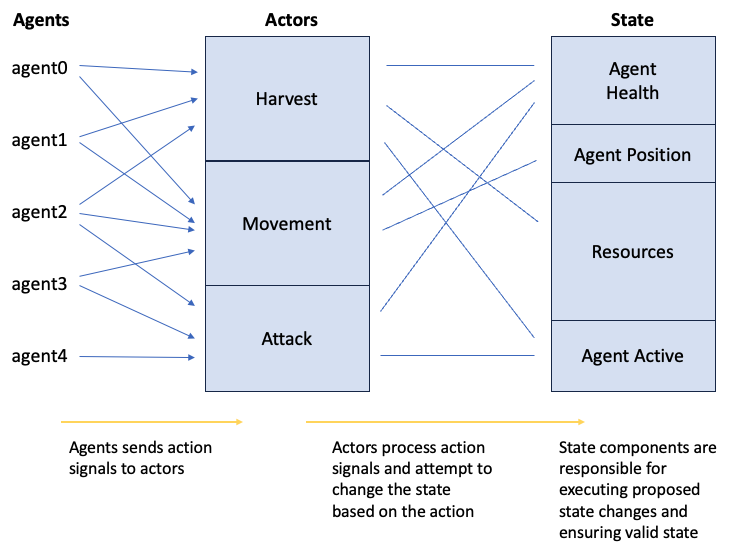
Agents send action signal to Actors, which process the action and attempt to change the state. The state components are responsible for executing state changes and ensuring the simulation remains in a valid state.
Generating Observations
After the simulation receives actions and updates the state, it generates observations for the respective agents using Observers. Observers query, filter, and transform data from the state components. For example, an agent may observe the health of all other agents within its vicinity. The observer is responsible for acquiring the health state and determining which agents are to be included in the observation. After generating the appropriate observation, the Observers send them to the agents, completing the simulation step.
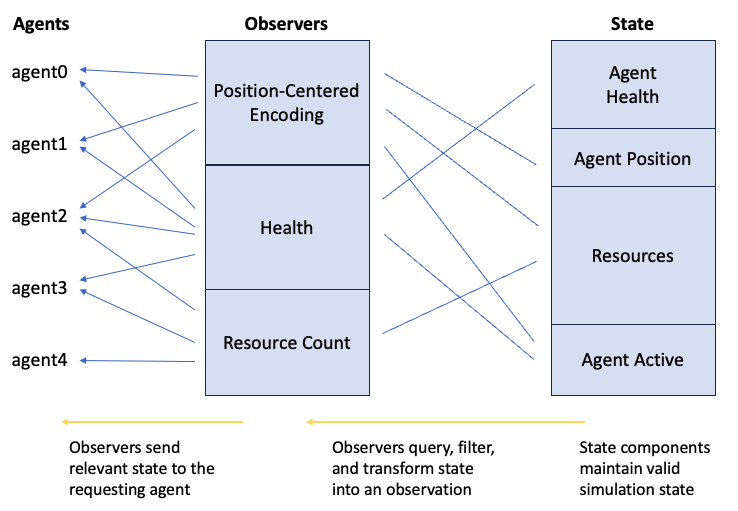
State components maintain the state of the simulation. Observers query, filter, and transform the state into observations and report those observations to the agents.
Components
Agent
Every entity in the simulation is a GridWorldAgent (e.g. walls, foragers, resources, fighters, etc.). GridWorldAgents are PrincipleAgents with specific parameters that work with their respective components. Agents must be given an encoding, which is a positive integer that correlates to the type of agent and simplifies the logic for many components of the framework. GridWorldAgents can also be configured with an initial position, the ability to block other agents’ abilities, and visualization parameters such as shape, color, and size.
Following the dataclass model, additional agent classes can be defined that allow them to work with various components. For example, GridObservingAgents can work with Observers, and MovingAgents can work with the MoveActor. Any new agent class should inhert from GridWorldAgent and possibly from ActingAgent or ObservingAgent as needed. For example, one can define a new type of agent like so:
from abmarl.sim.gridworld.agent import GridWorldAgent
from abmarl.sim import ActingAgent
class CommunicatingAgent(GridWorldAgent, ActingAgent):
def __init__(self, broadcast_range=None, **kwargs):
super().__init__(**kwargs)
self.broadcast_range = broadcast_range
...
Warning
Agents should follow the dataclass model, meaning that they should only be given parameters. All functionality should be written in the simulation components.
Grid
The Grid stores Agents in a two-dimensional numpy array. The Grid is configured to be a certain size (rows and columns) and to allow types of Agents to overlap (occupy the same cell). For example, you may want a ForagingAgent to be able to overlap with a ResourceAgent but not a WallAgent. The overlapping parameter is a dictionary that maps the Agent’s encoding to a set of other Agents’ encodings with which it can overlap. For example,
from abmarl.sim.gridworld.grid import Grid
overlapping = {
1: {2},
2: {1, 3},
3: {2, 3}
}
grid = Grid(5, 6, overlapping=overlapping)
means that agents whose encoding is 1 can overlap with other agents whose encoding is 2; agents whose encoding is 2 can overlap with other agents whose encoding is 1 or 3; and agents whose encoding is 3 can overlap with other agents whose encoding is 2 or 3.
Note
If overlapping is not specified, then no agents will be able to occupy the same cell in the Grid.
The Grid is referenced in every simulation component as well as the GridWorldSimulation itself. Interaction between simulation components and the Grid is data open, which means that we allow components to access the internals of the Grid. Although this is possible and sometimes necessary, the Grid also provides an interface for safer interactions with components. Components can query the Grid to see if an agent can be placed at a specific position. Components can place agents at a specific position in the Grid, which will succeed if that cell is available to the agent as per the overlapping configuration. And Components can remove agents from specific positions in the Grid.
State
State Components manage the state of the simulation alongside the Grid. At the bare minimum, each State resets the part of the simulation that it manages at the the start of each episode.
Actor
Actor Components are responsible for processing agent actions and producing changes to the state of the simulation. Actors assign supported agents with an appropriate action space and process agents’ actions based on the Actor’s key. The result of the action is a change in the simulation’s state, and Actors should return that change in a reasonable form. For example, the MoveActor appends MovingAgents’ action spaces with a ‘move’ channel and looks for the ‘move’ key in the agent’s incoming action. After a move is processed, the MoveActor returns if the move was successful.
Observer
Observer Components are responsible for creating an agent’s observation of the state of the simulation. Observers assign supported agents with an appropriate observation space and generate observations based on the Observer’s key. For example, the PositionCenteredEncodingObserver generates an observation of the nearby grid and stores it in the ‘position_centered_encoding’ channel of the ObservingAgent’s observation.
Done
Done Components manage the “done state” of each agent and of the simulation as a whole. Agents that are reported as done will cease sending actions to the simulation, and the episode will end when all the agents are done or when the simulation is done.
Component Wrappers
The GridWorld Simulation Framework also supports
Component Wrappers. Wrapping a component
can be useful when you don’t want to add a completely new component and
only need to make a modification to the way a component already works. A component
wrapper is itself a component, and so it must implement the same interface as the
wrapped component to ensure that it works within the framework. A component wrapper
also defines additional functions for wrapping spaces and data to and from those
spaces: check_space for ensuring the space can be transformed, wrap_space to
perform the transformation, wrap_point to map data to the transformed space,
and unwrap_point to map transformed data back to the original space.
As its name suggests, a Component Wrapper stands between the underlying component and other objects with which it exchanges data. As such, a wrapper typically modifies the incoming/outgoing data before leveraging the underlying component for the actual datda processing. The main difference among wrapper types is in the direction of data flow, which we detail below.
Actor Wrappers
Actor Wrappers receive actions in the
wrapped_space through the process_action
function. It can modify the data before sending it to the underlying Actor to
process. An Actor Wrapper may need to modify the action spaces of corresponding agents
to ensure that the action arrives in the correct format.
Building the Simulation
The GridWorldSimluation supports various methods of building a defined simulation. Each builder takes arguments specific to the builder. Additional arguments can be provided, and will be forwarded to the simulation for use in its components, for example.
Build Sim
Users can build a simulation by supplying the number of rows, columns, and a dictionary of agents. The grid is initialized to the specified size and populated using information contained in the agents dictionary in conjunction with the simulation’s state components. For example, the following simulation is built using information just from the dictionary of agents:
import numpy as np
from abmarl.examples.sim import MultiAgentGridSim
from abmarl.sim.gridworld.agent import GridWorldAgent
agent = GridWorldAgent(id='agent0', encoding=1, initial_position=np.array([0, 0]))
sim = MultiAgentGridSim.build_sim(
3, 4,
agents={'agent0': agent}
)
sim.reset()
This simulation has a grid of size (3 x 4) with a single agent with encoding
1 placed at position (0, 0).
Build Sim From Grid
Users can build a simulation by copying from an existing grid.
The builder will use the state of the grid as the initial state for the new grid
for the simulation. Particularly, agents will be assigned initial positions based
on their positions within the input grid. Extra agents can be included in the
simulation via the extra_agents argument. For example, the following simulation
is built using a pre-defined grid and extra agents:
import numpy as np
from abmarl.examples.sim import MultiAgentGridSim
from abmarl.sim.gridworld.agent import GridWorldAgent
from abmarl.sim.gridworld.grid import Grid
grid = Grid(2, 2)
grid.reset()
agents = {
'agent0': GridWorldAgent(id='agent0', encoding=1, initial_position=np.array([0, 0])),
'agent1': GridWorldAgent(id='agent1', encoding=1, initial_position=np.array([0, 1])),
'agent2': GridWorldAgent(id='agent2', encoding=1, initial_position=np.array([1, 0])),
}
grid.place(agents['agent0'], (0, 0))
grid.place(agents['agent1'], (0, 1))
grid.place(agents['agent2'], (1, 0))
extra_agents = {
'agent0': GridWorldAgent(id='agent0', encoding=2, initial_position=np.array([0, 1])),
'agent3': GridWorldAgent(id='agent3', encoding=3, initial_position=np.array([0, 1])),
'agent4': GridWorldAgent(id='agent4', encoding=4, initial_position=np.array([1, 0])),
'agent5': GridWorldAgent(id='agent5', encoding=5),
}
sim = MultiAgentGridSim.build_sim_from_grid(
grid,
extra_agents=extra_agents,
overlapping={1: {3, 4}, 3: {1}, 4: {1}}
)
sim.reset()
This simulation has a grid of size (2 x 2). Agents 0-2 are positioned in the
new grid according to their configuration in the original grid. Agents 3-5 are provided
as extra agents, not from the original grid. Agent0 appears as both an extra agent
and an agent in the original grid. If this happens, the builder prioritizes using
the agent as it exist in the original grid.
Note
In the example above, the builder itself does not use the overlapping argument.
That is passed on to the simulation.
Note
For consistency, the agents from the input grid should have their position in
the grid as their initial_position.
Caution
The agents from the input grid are shallow-copied.
Build Sim From Array
Users can build a simulation by populating a grid based on an array. The array must be 2-dimensional and contain alphanumeric characters corresponding to entries in an object registry. The object registry is a dictionary that maps those entries to agent-building functions, assigning each agent a unique id. Agents will be placed within the grid according to its position in the array. As above, extra agents can be included. The following simulation is built using an array, object registry, and extra agents:
import numpy as np
from abmarl.examples.sim import MultiAgentGridSim
from abmarl.sim.gridworld.agent import GridWorldAgent
array = np.array([
['A', '.', 'B', '0', ''],
['B', '_', '', 'C', 'A']
])
obj_registry = {
'A': lambda n: GridWorldAgent(
id=f'A-class-barrier{n}',
encoding=1,
),
'B': lambda n: GridWorldAgent(
id=f'B-class-barrier{n}',
encoding=2,
),
'C': lambda n: GridWorldAgent(
id=f'C-class-barrier{n}',
encoding=3,
),
}
extra_agents = {
'B-class-barrier2': GridWorldAgent(
id='B-class-barrier2',
encoding=4,
initial_position=np.array([1, 0])
),
'extra_agent0': GridWorldAgent(
id='extra_agent0',
encoding=5,
initial_position=np.array([0, 0])
),
'extra_agent1': GridWorldAgent(
id='extra_agent1',
encoding=5,
initial_position=np.array([0, 0])
),
'extra_agent2': GridWorldAgent(
id='extra_agent2',
encoding=6,
initial_position=np.array([0, 4])
)
}
sim = MultiAgentGridSim.build_sim_from_array(
array,
obj_registry,
extra_agents=extra_agents,
overlapping={1: {5}, 5: {1, 5}}
)
sim.reset()
This simulation has a grid of size (2 x 5), matching the input array. There
are 3 types of agents in the object registry corresponding with the characters in
the input array. B-class-barrier2 appears in the extra agents, but it is also built
from the input array. If this happens, the builder prioritizes using
the agent as is built from the array.
Note
Dots, underscores, and zeros are reserved as empty space and cannot be used in the object registry.
Build Sim From File
Building from a file works in the same way as building from an array. Here, the input is a file with alphanumeric characteres ordered in a grid-like fashion. An object registry is used to interpret those characters into agents, and they are placed in the grid. As above, extra agents can be included. The following shows an example of building a simulation from file:
A . B 0 _
B _ _ C A
This input file has two lines with 5 entries each, which will result in a 2 x 5
grid. Each entry is seperated by a space. Dots, underscores, and zeros are reserved
for empty spaces.
import numpy as np
from abmarl.examples.sim import MultiAgentGridSim
from abmarl.sim.gridworld.agent import GridWorldAgent
file_name = 'grid_file.txt'
obj_registry = {
'A': lambda n: GridWorldAgent(
id=f'A-class-barrier{n}',
encoding=1,
),
'B': lambda n: GridWorldAgent(
id=f'B-class-barrier{n}',
encoding=2,
),
'C': lambda n: GridWorldAgent(
id=f'C-class-barrier{n}',
encoding=3,
),
}
extra_agents = {
'B-class-barrier2': GridWorldAgent(
id='B-class-barrier2',
encoding=4,
initial_position=np.array([1, 0])
),
'extra_agent0': GridWorldAgent(
id='extra_agent0',
encoding=5,
initial_position=np.array([0, 0])
),
'extra_agent1': GridWorldAgent(
id='extra_agent1',
encoding=5,
initial_position=np.array([0, 0])
),
'extra_agent2': GridWorldAgent(
id='extra_agent2',
encoding=6,
initial_position=np.array([0, 4])
)
}
sim = MultiAgentGridSim.build_sim_from_file(
file_name,
obj_registry,
extra_agents=extra_agents,
overlapping={1: {5}, 5: {1, 5}}
)
sim.reset()
This simulation is the same as the one above that was built from the array.
Smart Simulation and Registry
The SmartGridWorldSimulation streamlines the creation of simulations by allowing users to provide the components by name at simulation initialization instead of including them directly in the simulation definition. The SmartSim supports all the fundamental component types except for Actor, which still need to be included in the definition. It pre-fills the getters and reset function, leaving only the step function to be defined by the user.
The SmartGridWorldSimulation enables users to rapidly swap out components, thus changing the behavior of the simulation, without modifying the definition. For example, the following code block defines one simulation class, but several fundamentally different simulations can be intialized from it.
from abmarl.sim.gridworld.smart import SmartGridWorldSimulation
from abmarl.sim.gridworld.actor import MoveActor
class MyGridSim(SmartGridWorldSimulation):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.move_actor = MoveActor(**kwargs)
self.finalize()
def step(self, action_dict):
for agent_id, action in action_dict.items():
self.move_actor.process_action(self.agents[agent_id], action)
sim1 = MyGridSim.build(
...,
states={'MazePlacementState', 'HealthState'},
observers={'PositionCenteredEncodingObserver'},
dones={'TargetAgentDone'},
...
)
sim2 = MyGridSim.build(
...,
states={'MazePlacementState', 'HealthState'},
observers={'AbsolutePositionObserver'},
dones={'TargetAgentDone'},
...
)
sim3 = MyGridSim.build(
...,
states={'TargetBarriersFreePlacementState', 'HealthState'},
observers={'StackedPositionCenteredEncodingObserver'},
dones={'ActiveDone'},
...
)
sim4 = MyGridSim.build(
...,
states={'PositionState', 'HealthState'},
observers={'AbsoluteEncodingObserver'},
dones={'OneTeamRemainingDone'},
...
)
All built-in features are automatically included in the GridWorld Simulation Framework registry and are registered by their class name. Custom components can be registered and then used in the same manner.
Built-in Features
Below is a list of some features that are available to use out of the box. Rememeber, you can create your own features in the GridWorld Simulation Framework and use many combinations of components together to make up a simulation.
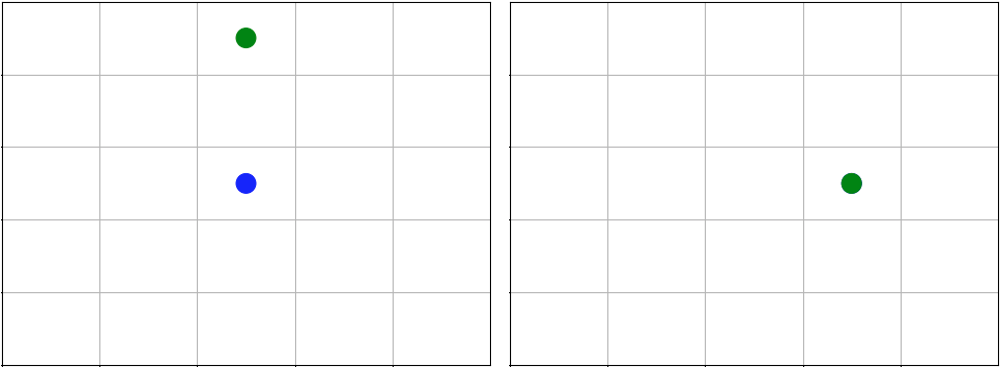
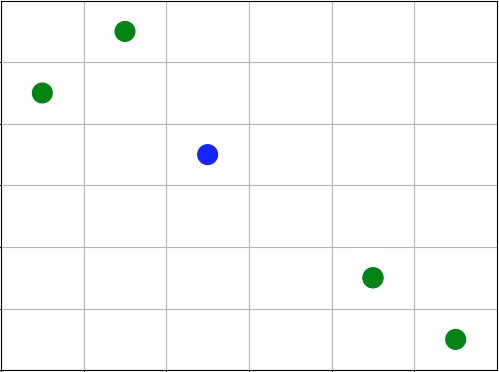
Position
Agents have positions in the Grid that are managed by the PositionState. Agents can be configured with an initial position, which is where they will start at the beginning of each episode. If they are not given an initial position, then they will start at a random cell in the grid. The order in which agents are placed at the beginning of an episode can be randomized with the randomize_placement_order parameter. Agents can overlap according to the Grid’s overlapping configuration. For example, consider the following setup:
import numpy as np
from abmarl.sim.gridworld.agent import GridWorldAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState
agent0 = GridWorldAgent(
id='agent0',
encoding=1,
initial_position=np.array([2, 4])
)
agent1 = GridWorldAgent(
id='agent1',
encoding=1
)
agent2 = GridWorldAgent(
id='agent2',
encoding=1
)
position_state = PositionState(
agents={'agent0': agent0, 'agent1': agent1, 'agent2': agent2},
grid=Grid(4, 5)
)
position_state.reset()
agent0 is configured with an initial position. At the start of each episode, agent0 will be placed at (2, 4) and agent1 and agent2 will be placed anywhere in the grid without overlapping. Because randomize_placement_order is off by default, agent1 will be randomly placed before agent2 because it appears in the agents dictionary first.
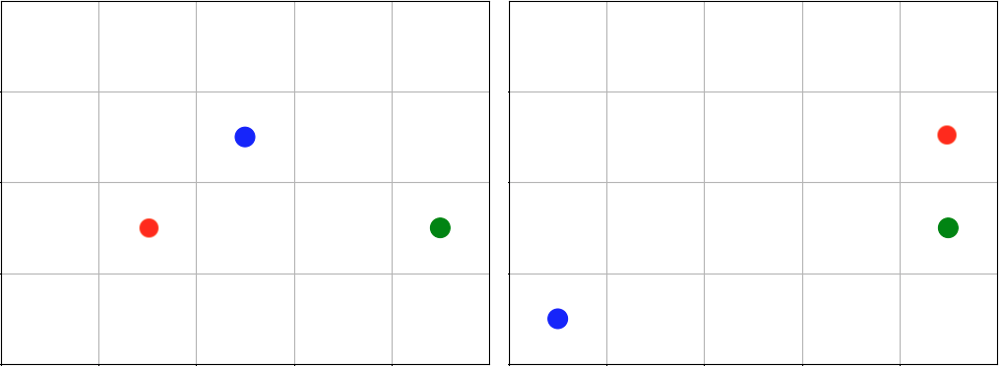
agent0 in green starts at the same cell in every episode, and agent1 in blue and agent2 in red start at random cells each time.
Maze Placement State
The MazePlacementState is a specialized state component used for positioning agents within mazes. The cells are partitioned into free and barrier cells. Barrier-encoded agents can be placed on barrier cells and free-encoded agents can be placed on free cells. There must be a target agent, which is used for clustering barriers and scattering free agents.
Note
Because the maze is randomly generated at the beginning of each episode and because the agents must be placed in either a free cell or barrier cell according to their encodings, it is highly recommended that none of your agents be given initial positions, except for the target agent.
The MazePlacementState is very useful for randomly placing agents at the beginning of each episode while maintaining a desired structure. In this case, we can use this state component to keep barriers clustered around a target and scatter free agents away from it, regardless of where that target is positioned at the beginning of each episode. The clustering is such that all paths to the target are not blocked.
Animation showing a target (green) starting at random positions at the beginning of each episode. Barriers (gray squares) are clustered near the target without blocking all paths to it. Free agents (blue) are scattered far from the target.
Target Barriers Free Placement State
The TargetBarriersFreePlacementState is a specialized state component used for positioning agents relative to a target. Barrier-encoded agents can be clustered near the target, and free-encoded agents can be scattered away from the target.
Note
Agents with initial positions may conflict with the target agent. If the target agent is configured for random placement, then we recommend not assigning an initial position to any agent.
The TargetBarriersFreePlacementState is very useful for randomly placing agents at the beginning of each episode while maintaining a desired structure. In this case, we can use this state component to completely enclose a target with barrier agents and scatter the free agents away from it.
Animation showing a target (green) starting at random positions at the beginning of each episode. Barriers (gray squares) completely enclose the target. Free agents (blue and red) are scattered far from the target.
Note
If clustering/scattering is turned on, the state component will loop through the viable agents in order. You can take advantage of this order to place certain types of agents at different distances from the target. You can also randomize the ordering by setting randomize_placement_order to True.
Movement
MovingAgents can move around the Grid in conjunction with the MoveActor. MovingAgents require a move range parameter, indicating how many spaces away they can move in a single step. Agents cannot move out of bounds and can only move to the same cell as another agent if they are allowed to overlap. For example, in this setup
import numpy as np
from abmarl.sim.gridworld.agent import MovingAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState
from abmarl.sim.gridworld.actor import MoveActor
agents = {
'agent0': MovingAgent(
id='agent0', encoding=1, move_range=1, initial_position=np.array([2, 2])
),
'agent1': MovingAgent(
id='agent1', encoding=1, move_range=2, initial_position=np.array([0, 2])
)
}
grid = Grid(5, 5, overlapping={1: {1}})
position_state = PositionState(agents=agents, grid=grid)
move_actor = MoveActor(agents=agents, grid=grid)
position_state.reset()
move_actor.process_action(agents['agent0'], {'move': np.array([0, 1])})
move_actor.process_action(agents['agent1'], {'move': np.array([2, 1])})
agent0 starts at position (2, 2) and can move up to one cell away. agent1 starts at (0, 2) and can move up to two cells away. The two agents can overlap each other, so when the move actor processes their actions, both agents will be at position (2, 3).
agent0 and agent1 move to the same cell.
The MoveActor automatically assigns a null action of [0, 0], indicating no move.
Cross Move Actor
The CrossMoveActor is very similar to the
MoveActor. Rather than moving to any nearby squares
based on some move_range, MovingAgents
can move either up, down, left, right, or stay in place. The move_range parameter
is ignored. The CrossMoveActor automatically assigns a null_action of 0, indicating
the agent stays in place.
Orientation and Drifting
OrientationAgents have a direction which can be used with the DriftMoveActor to move the agent around the grid by “drifting” it in the direction it is facing. As in the CrossMoveActor, agents can choose to move up, down, left, right, or “no change”. If an agent chooses “no change” it will continue drifting in the direction of its orientation until it bumps into another agent with which it cannot overlap. If it chooses to change directions, the Actor will first check if the change is valid, and if so, it will reorient the agent to that direction and move it one cell. If the change is not valid, then the agent will continue in its current orientation and drift if possible. For example, if the agent is moving right in a corridor and attempts to move up, that move will fail and it will continue drifting. Again, if the agent is in the corner and attempts to change orientation (but still in the corner), that change will fail and it will keep its current orientation, even though it is blocked that way too.
Absolute Position Observer
The AbsolutePositionObserver enables
ObservingAgents to observe their own absolute position
in the grid. The position is reported as a two-dimensional numpy array, whose lower
bounds are (0, 0) and upper bounds are the size of the grid minus one. This
observer does not provide information on any other agent in the grid.
Absolute Encoding Observer
AbsoluteEncodingObserver means that the GridObservingAgent observes the grid as though it were looking at it from the top down, “from the grid’s perspective”, so to speak. As agents move around, the grid stays fixed and the observation shows each agent according to their actual positions. Agents are represented by their encodings, and in order for the observing agent to distinguish itself from other entities of the same encoding, it sees itself as a -1.
An agent’s observation may be restricted by its own view_range and by other
agents’ blocking. This imposes a “fog of war” type masking
on the observations. Cells that are not observable will be represented as a -2.
For example, the following setup
import numpy as np
from abmarl.sim.gridworld.agent import GridObservingAgent, GridWorldAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState
from abmarl.sim.gridworld.observer import AbsoluteEncodingObserver
agents = {
'agent0': GridObservingAgent(id='agent0', encoding=1, initial_position=np.array([2, 2]), view_range=2),
'agent1': GridWorldAgent(id='agent1', encoding=2, initial_position=np.array([0, 1])),
'agent2': GridWorldAgent(id='agent2', encoding=3, initial_position=np.array([1, 0])),
'agent3': GridWorldAgent(id='agent3', encoding=4, initial_position=np.array([4, 4])),
'agent4': GridWorldAgent(id='agent4', encoding=5, initial_position=np.array([4, 4])),
'agent5': GridWorldAgent(id='agent5', encoding=6, initial_position=np.array([5, 5]))
}
grid = Grid(6, 6, overlapping={4: {5}, 5: {4}})
position_state = PositionState(agents=agents, grid=grid)
observer = AbsoluteEncodingObserver(agents=agents, grid=grid)
position_state.reset()
observer.get_obs(agents['agent0'])
will position agents as below and output an observation for agent0 (blue) like so:
[ 0, 2, 0, 0, 0, -2],
[ 3, 0, 0, 0, 0, -2],
[ 0, 0, -1, 0, 0, -2],
[ 0, 0, 0, 0, 0, -2],
[ 0, 0, 0, 0, 3*, -2],
[-2, -2, -2, -2, -2, -2],
This is a 6 x 6 grid, so the observation is the same size. The observing agent
is located at (2, 2) in the grid, just as its position indicates. Other agents appear
in the grid represented as their encodings and appear according to their actual positions. Because
the observing agent only has a view_range of 2, it cannot see the last row or
column, so the observation masks those cells with the value of -2. There are two
agents at position (4, 4), one with encoding 3 and another with encoding 4. The
AbsoluteEncodingObserver randomly chooses
one from among those encodings.
The AbsoluteEncodingObserver automatically assigns a null observation as a matrix of all -2s, indicating that everything is masked.
Position Centered Encoding Observer
GridObservingAgents can observe the state
of the Grid around them, namely which other agents are nearby,
via the PositionCenteredEncodingObserver.
The PositionCenteredEncodingObserver generates a two-dimensional matrix sized by
the agent’s view range with the observing agent located at the center of the matrix. While the
AbsoluteEncodingObserver observes agents according
to their actual positions, the PositionCenteredEncodingObserver observes agents according to their
relative positions.
All other agents within the view range will appear in the observation, shown as
their encoding. For example, using the above setup with a view_range of 3
will output an observation for agent0 (blue) like so:
[-1, -1, -1, -1, -1, -1, -1],
[-1, 0, 2, 0, 0, 0, 0],
[-1, 3, 0, 0, 0, 0, 0],
[-1, 0, 0, 1, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 4*, 0],
[-1, 0, 0, 0, 0, 0, 6]
Since view range is the number of cells away that can be observed, the observation size is
(2 * view_range + 1) x (2 * view_range + 1). agent0 is centered in the middle
of this array, shown by its encoding: 1. All other agents appear in the observation
relative to agent0’s position and shown by their encodings. The agent observes some out
of bounds cells, which appear as -1s. agent3 and agent4 occupy the same cell,
and the PositionCenteredEncodingObserver
will randomly select between their encodings for the observation.
By setting observe_self to False, the PositionCenteredEncodingObserver can be configured so that an agent doesn’t observe itself and only observes other agents, which may be helpful if overlapping is an important part of the simulation.
The PositionCenteredEncodingObserver automatically assigns a null observation as a matrix of all -2s, indicating that everything is masked.
Stacked Position Centered Encoding Observer
Similar to the PositionCenteredEncodingObserver, the StackedPositionCenteredEncodingObserver observes the grid from the observing agent’s perspective. It displays a separate matrix for every encoding. Each matrix shows the relative positions of the agents and the number of those agents that occupy each cell. Out of bounds indicators (-1) and masked cells (-2) are present in every matrix. For example, the above setup would show an observation like so:
# Encoding 1
[-1, -1, -1, -1, -1, -1, -1],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 1, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0]
# Encoding 2
[-1, -1, -1, -1, -1, -1, -1],
[-1, 0, 1, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0]
...
StackedPositionCenteredEncodingObserver may be preferable to PositionCenteredEncodingObserver in simulations where there are many overlapping agents.
The StackedPositionCenteredEncodingObserver automatically assigns a null observation of a tensor of all -2s, indicating that everything is masked.
Blocking
Agents can block other agents’ abilities and characteristics, such as blocking
them from view, which masks out parts of the observation. For example,
if agent4 above is configured with blocking=True, then the
PositionCenteredEncodingObserver would
produce an observation like this:
[-1, -1, -1, -1, -1, -1, -1],
[-1, 0, 2, 0, 0, 0, 0],
[-1, 3, 0, 0, 0, 0, 0],
[-1, 0, 0, 1, 0, 0, 0],
[-1, 0, 0, 0, 0, 0, 0],
[-1, 0, 0, 0, 0, 4*, 0],
[-1, 0, 0, 0, 0, 0, -2]
The -2 indicates that the cell is masked, and the choice of displaying agent3 over agent4 is still a random choice. Which cells get masked by blocking agents is determined by drawing two lines from the center of the observing agent’s cell to the corners of the blocking agent’s cell. Any cell whose center falls between those two lines will be masked, as shown below.
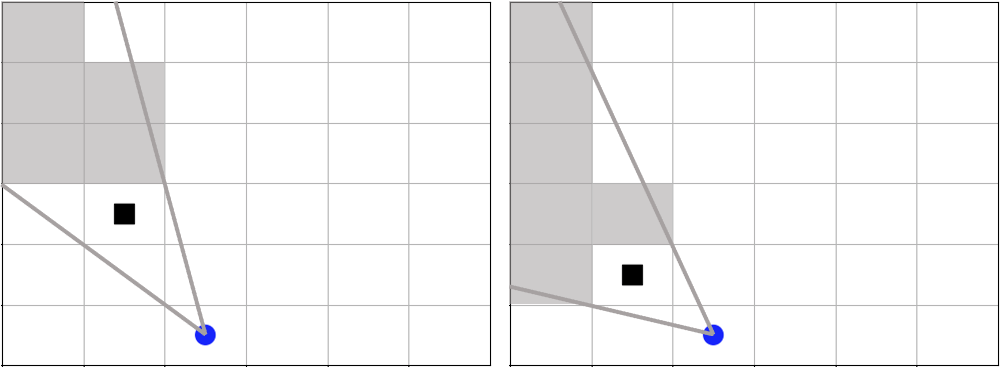
The black agent is a wall agent that masks part of the grid from the blue agent. Cells whose centers fall betweent the lines are masked. Centers that fall directly on the line or outside of the lines are not masked. Two setups are shown to demonstrate how the masking may change based on the agents’ positions.
Blocking works with any of the built-in grid observers.
Health
HealthAgents track their health throughout the simulation. Health is always bounded between 0 and 1. Agents whose health falls to 0 are marked as inactive. They can be given an initial health, which they start with at the beginning of the episode. Otherwise, their health will be a random number between 0 and 1, as managed by the HealthState. Consider the following setup:
from abmarl.sim.gridworld.agent import HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import HealthState
agent0 = HealthAgent(id='agent0', encoding=1)
grid = Grid(3, 3)
agents = {'agent0': agent0}
health_state = HealthState(agents=agents, grid=grid)
health_state.reset()
agent0 will be assigned a random health value between 0 and 1.
Ammo
AmmoAgents track their ammo throughout the simulation. Each Attack Actor interprets the ammo, but the general idea is that when the attacking agent runs out of ammo, its attacks are no longer successful.
AmmoObservingAgents work in conjuction with the AmmoObserver to observe their own ammo.
Attacking
Health and ammo become more interesting when we let agents attack one another. AttackingAgents work in conjunction with an AttackActor. They have an attack range, which dictates the range of their attack; an attack accuracy, which dictates the chances of the attack being successful; an attack strength, which dictates how much health is depleted from the attacked agent, and a simultaneous attacks, which dictates the number of attacks an agent can make per turn.
An AttackActor interprets these properties and processes the attacks according to its own internal design. In general, each AttackActor determines some set of attackable agents according to the following criteria:
The attack mapping, which is a dictionary that determines which encodings can attack other encodings (similar to the overlapping parameter for the Grid), must allow the attack.
The relative positions of the two agents must fall within the attacking agent’s attack range.
The attackable agent must not be masked (e.g. hiding behind a wall). The masking is determined the same way as blocking described above.
Then, the AttackActor selects agents from that set based on the attacking agent’s simultaneous attacks and ammo (if applicable). When an agent is successfully attacked, its health is depleted by the attacking agent’s attack strength, which may result in the attacked agent’s death. AttackActors can be configured to allow multiple attacks against a single agent per attacking agent and per turn via the stacked attacks property. The following four AttackActors are built into Abmarl:
Binary Attack Actor
With the BinaryAttackActor, AttackingAgents can choose to launch attacks up to its simultaneous attacks or not to attack at all. For each attack, the BinaryAttackActor randomly searches the vicinity of the attacking agent for an attackble agent according to the basic criteria listed above. Consider the following setup:
import numpy as np
from abmarl.sim.gridworld.agent import AttackingAgent, HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState, HealthState
from abmarl.sim.gridworld.actor import BinaryAttackActor
agents = {
'agent0': AttackingAgent(
id='agent0',
encoding=1,
initial_position=np.array([0, 0]),
attack_range=1,
attack_strength=0.4,
attack_accuracy=1,
simultaneous_attacks=2
),
'agent1': HealthAgent(id='agent1', encoding=2, initial_position=np.array([1, 0]), initial_health=1),
'agent2': HealthAgent(id='agent2', encoding=2, initial_position=np.array([1, 1]), initial_health=0.3),
'agent3': HealthAgent(id='agent3', encoding=3, initial_position=np.array([0, 1]))
}
grid = Grid(2, 2)
position_state = PositionState(agents=agents, grid=grid)
health_state = HealthState(agents=agents, grid=grid)
attack_actor = BinaryAttackActor(agents=agents, grid=grid, attack_mapping={1: {2}}, stacked_attacks=False)
position_state.reset()
health_state.reset()
attack_actor.process_action(agents['agent0'], {'attack': 2})
assert not agents['agent2'].active
assert agents['agent1'].active
assert agents['agent3'].active
attack_actor.process_action(agents['agent0'], {'attack': 2})
assert agents['agent1'].active
assert agents['agent3'].active
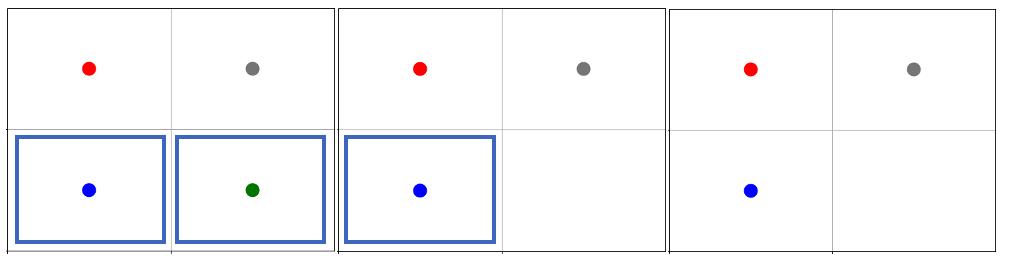
agent0 in red launches four attacks over two turns. agent1 and agent2, blue and green respectively, are attackable. agent2 dies because its health falls to zero, but agent1 continues living even after two attacks.
As per the attack mapping, agent0 can attack agent1 or agent2 but not agent3. It can make two attacks per turn, but because the stacked attacks property is False, it cannot attack the same agent twice in the same turn. Looking at the attack strength and initial health of the agents, we can see that agent0 should be able to kill agent2 with one attack but it will require three attacks to kill agent1. In each turn, agent0 uses both of its attacks. In the first turn, both agent1 and agent2 are attacked and agent2 dies. In the second turn, agent0 attempts two attacks again, but because there is only one attackable agent in its vicinity and because stacked attacks are not allowed, only one of its attacks is successful: agent1 is attacked, but it continues to live since it still has health. agent3 was never attacked because although it is within agent0’s attack range, it is not in the attack mapping.
The BinaryAttackActor automatically assigns a null action of 0, indicating no attack.
Encoding Based Attack Actor
The EncodingBasedAttackActor allows AttackingAgents to choose some number of attacks per each encoding. For each attack, the EncodingBasedAttackActor randomly searches the vicinity of the attacking agent for an attackble agent according to the basic criteria listed above. Contrast this actor with the BinaryAttackActor above, which does not allow agents to specify attack by encoding. Consider the following setup:
import numpy as np
from abmarl.sim.gridworld.agent import AttackingAgent, HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState, HealthState
from abmarl.sim.gridworld.actor import EncodingBasedAttackActor
agents = {
'agent0': AttackingAgent(
id='agent0',
encoding=1,
initial_position=np.array([0, 0]),
attack_range=1,
attack_strength=0.4,
attack_accuracy=1,
simultaneous_attacks=2
),
'agent1': HealthAgent(id='agent1', encoding=2, initial_position=np.array([1, 0]), initial_health=1),
'agent2': HealthAgent(id='agent2', encoding=2, initial_position=np.array([1, 1]), initial_health=1),
'agent3': HealthAgent(id='agent3', encoding=3, initial_position=np.array([0, 1]), initial_health=0.5)
}
grid = Grid(2, 2)
position_state = PositionState(agents=agents, grid=grid)
health_state = HealthState(agents=agents, grid=grid)
attack_actor = EncodingBasedAttackActor(agents=agents, grid=grid, attack_mapping={1: {2, 3}}, stacked_attacks=True)
position_state.reset()
health_state.reset()
attack_actor.process_action(agents['agent0'], {'attack': {2: 0, 3: 2}})
assert agents['agent1'].health == agents['agent1'].initial_health
assert agents['agent2'].health == agents['agent2'].initial_health
assert not agents['agent3'].active
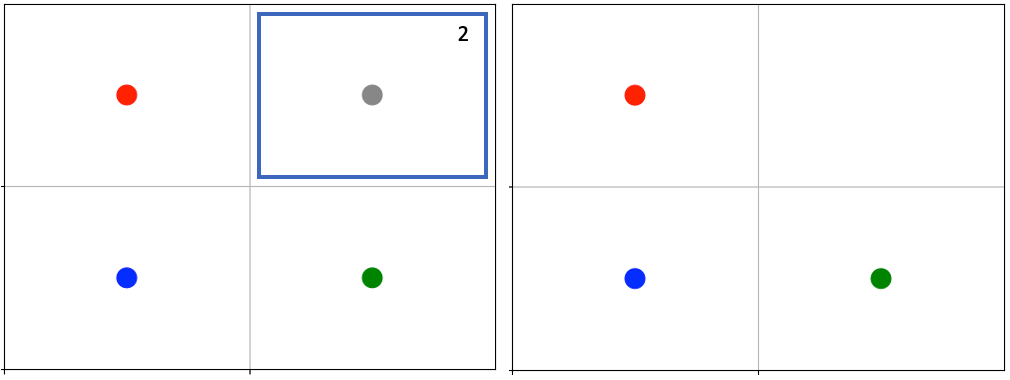
agent0 in red launches two attacks against encoding 3. Because stacked attacks are allowed, both attacks fall on agent3 in the same turn, resulting in its death.
As per the attack mapping, agent0 can attack all the other agents. It can make up to two attacks per turn per encoding (e.g. two attacks on encoding 2 and two attacks on encoding 3 per turn), and because the stacked attacks property is True, it can attack the same agent twice in the same turn. Looking at the attack strength and initial health of the agents, we can see that agent0 should be able to kill agent3 with only two attacks. agent0 launches no attacks on encoding 2 and two attacks on encoding 3. Because agent3 is the only agent of encoding 3 and because stacked attacks are allowed, it gets attacked twice in one turn, resulting in its death. Even though agent1 and agent2 are in agent0’s attack mapping and attack range, neither of them is attacked because agent0 specified zero attacks on encoding 2.
The EncodingBasedAttackActor automatically assigns a null action of 0 for each encoding, indicating no attack.
Selective Attack Actor
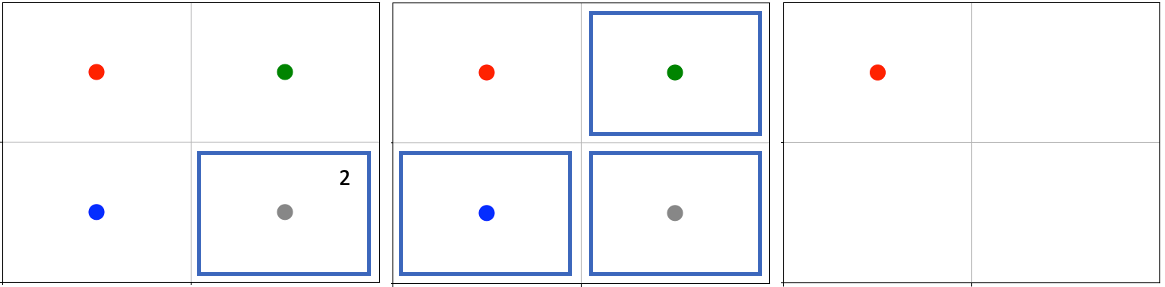
The SelectiveAttackActor allows AttackingAgents to specify some number of attacks on each of the cells in some local grid defined by the agent’s attack range. In contrast to the BinaryAttackActor and EncodingBasedAttackActor above, the SelectiveAttackActor does not randomly search for agents in the vicinity because it receives the attacked cells directly. The attacking agent can attack each cell up to its simultaneous attacks. Attackable agents are defined according to the basic criteria listed above. If there are multiple attackable agents on the same cell, the actor randomly picks from among them based on the number of attacks on that cell and whether or not stacked attacks are allowed. Consider the following setup:
import numpy as np
from abmarl.sim.gridworld.agent import AttackingAgent, HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState, HealthState
from abmarl.sim.gridworld.actor import SelectiveAttackActor
agents = {
'agent0': AttackingAgent(
id='agent0',
encoding=1,
initial_position=np.array([0, 0]),
attack_range=1,
attack_strength=1,
attack_accuracy=1,
simultaneous_attacks=2
),
'agent1': HealthAgent(id='agent1', encoding=2, initial_position=np.array([1, 0]), initial_health=1),
'agent2': HealthAgent(id='agent2', encoding=2, initial_position=np.array([0, 1]), initial_health=1),
'agent3': HealthAgent(id='agent3', encoding=3, initial_position=np.array([0, 1]))
}
grid = Grid(2, 2, overlapping={2: {3}, 3: {2}})
position_state = PositionState(agents=agents, grid=grid)
health_state = HealthState(agents=agents, grid=grid)
attack_actor = SelectiveAttackActor(agents=agents, grid=grid, attack_mapping={1: {2}}, stacked_attacks=False)
position_state.reset()
health_state.reset()
attack = np.array([
[0, 1, 0],
[0, 1, 2],
[0, 1, 0]
])
attack_actor.process_action(agents['agent0'], {'attack': attack})
assert not agents['agent1'].active
assert not agents['agent2'].active
assert agents['agent3'].active
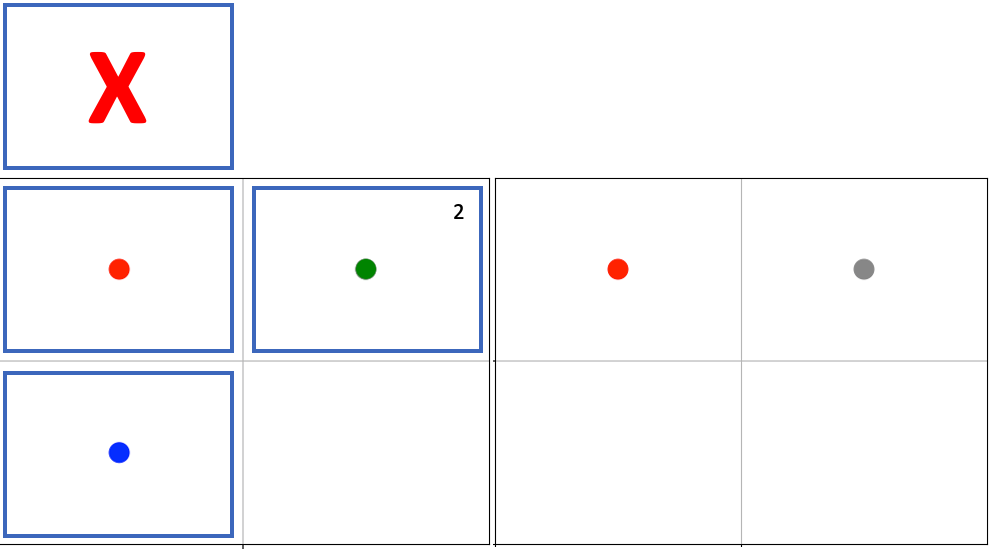
agent0 in red launches five attacks in the highlighted cells, resulting in agent1 and agent2 dying.
As per the attack mapping, agent0 can attack agent1 or agent2 but not agent3. It can make two attacks per turn per cell, but because the stacked attacks property is False, it cannot attack the same agent twice in the same turn. Looking at the attack strength and initial health of the agents, we can see that agent0 should be able to kill agent1 and agent2 with a single attack each. agent0 launches 5 attacks: one on the cell above, one on its own cell, one on the cell below, and two on the cell to the right. The attack above is on a cell that is out of bounds, so this attack does nothing. The attack on its own cell fails because there are no attackable agents there. agent1 is on the cell below, and that attack succeeds. agent2 and agent3 are both on the cell to the right, but only agent2 is attackable per the attack mapping and stacked attacks are not allowed, so only one of the launched attacks is successful.
The SelectiveAttackActor automatically assigns a grid of 0s as the null action, indicating no attack on any cell.
Restricted Selective Attack Actor
The RestrictedSelectiveAttackActor allows AttackingAgents to specify some number of attacks in some local grid defined by the attacking agent’s attack range. This actor is more restricted than its counterpart, the SelectiveAttackActor, because rather than issuing attacks up to its simultaneous attacks per cell, the attacking agent can only issue that many attacks in the whole local grid. Attackable agents are defined according to the basic criteria listed above. If there are multiple attackable agents on a the same cell, the actor randomly picks from among them based on the number of attacks on that cell and whether or not stacked attacks are allowed. Consider the following setup:
import numpy as np
from abmarl.sim.gridworld.agent import AttackingAgent, HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState, HealthState
from abmarl.sim.gridworld.actor import RestrictedSelectiveAttackActor
agents = {
'agent0': AttackingAgent(
id='agent0',
encoding=1,
initial_position=np.array([0, 0]),
attack_range=1,
attack_strength=0.6,
attack_accuracy=1,
simultaneous_attacks=3
),
'agent1': HealthAgent(id='agent1', encoding=2, initial_position=np.array([1, 0]), initial_health=0.1),
'agent2': HealthAgent(id='agent2', encoding=2, initial_position=np.array([0, 1]), initial_health=0.1),
'agent3': HealthAgent(id='agent3', encoding=2, initial_position=np.array([1, 1]), initial_health=1)
}
grid = Grid(2, 2)
position_state = PositionState(agents=agents, grid=grid)
health_state = HealthState(agents=agents, grid=grid)
attack_actor = RestrictedSelectiveAttackActor(agents=agents, grid=grid, attack_mapping={1: {2}}, stacked_attacks=False)
position_state.reset()
health_state.reset()
out = attack_actor.process_action(agents['agent0'], {'attack': [9, 9, 0]})
assert agents['agent3'].active
assert agents['agent3'].health == 0.4
out = attack_actor.process_action(agents['agent0'], {'attack': [9, 6, 8]})
assert not agents['agent1'].active
assert not agents['agent2'].active
assert not agents['agent3'].active
agent0 in red launches two attacks against the bottom right cell, catching agent3 with one of them. Then it finishes off all the agents in the next turn.
As per the attack mapping, agent0 can attack all the other agents, and it can issue up to three attacks per turn. stacked attacks is False, so the same agent cannot be attacked twice in the same turn. Looking at the attack strength and initial health of the agents, we can see that agent0 should be able to kill agent1 and agent2 with a single attack each but will need two attacks to kill agent3. In the first turn, agent0 launches two attacks to the bottom right cell and chooses not to use its third attack. agent3 is the only attackable agent on this cell, but because stacked attacks are not allowed, it only gets attacked once. In the next turn, agent0 issues an attack on each of the three occupied cells, and each attack is succesful.
The RestrictedSelectiveAttackActor automatically assigns an array of 0s as the null action, indicating no attack on any cell.
Note
The form of the attack in the RestrictedSelectiveAttackActor is the most difficult for humans to interpret. The number of entries in the array reflects the agent’s simultaneous attacks. The attack appears as the cell’s id, which is determined from ravelling the local grid, where 0 means no attack, 1 is the top left cell, 2 is to the right of that, and so on through the whole local grid.
Active Done
The ActiveDone component reports that agents are done based on their active property. If the agent is inactive, then it is done. If all the agents are inactive, then the entire simulation is done.
One Team Remaining Done
The OneTeamRemainingDone component reports that the simulation is done when there is only one “team” remaining; that is, when all the remaining active agents have the same encoding. This component does not report done for individual agents.
Target Agent Done
The TargetAgentDone component takes
a target_mapping, which maps agents to their targets by id. If an agent overlaps
its target, then that agent is done. If all of the agents have overlapped their
targets, then the simulation is done.
Target Destroyed Done
The TargetDestroyedDone component takes
a target_mapping, which maps agents to their targets by id. If an agent’s target
becomes inactive, then that agent is done, regardless of its own involvement in
that change. If all target agents become inactive, then the simulation is done.
RavelActionWrapper
The RavelActionWrapper transforms
Discrete, MultiBinary, MultiDiscrete, bounded integer Box, and any nesting of those
spaces into a Discrete space by “ravelling” their values according to numpy’s
ravel_multi_index function. Thus, actions that are represented by arrays are
converted into unique Discrete numbers. For example, we can apply the RavelActionWrapper
to the MoveActor, like so:
from abmarl.sim.gridworld.agent import MovingAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState
from abmarl.sim.gridworld.actor import MoveActor
from abmarl.sim.gridworld.wrapper import RavelActionWrapper
agents = {
'agent0': MovingAgent(id='agent0', encoding=1, move_range=1),
'agent1': MovingAgent(id='agent1', encoding=1, move_range=2)
}
grid = Grid(5, 5)
position_state = PositionState(agents=agents, grid=grid)
move_actor = MoveActor(agents=agents, grid=grid)
for agent in agents.values():
agent.finalize()
position_state.reset()
# Move actor without wrapper
actions = {
agent.id: agent.action_space.sample() for agent in agents.values()
}
actions
>>> {'agent0': OrderedDict([('move', array([1, 1]))]), 'agent1': OrderedDict([('move', array([ 2, -1]))])}
# Wrapped move actor
move_actor = RavelActionWrapper(move_actor)
actions = {
agent.id: agent.action_space.sample() for agent in agents.values()
}
actions
>>> {'agent0': OrderedDict([('move', 1)]), 'agent1': OrderedDict([('move', 22)])}
The actions from the unwrapped actor are in the original Box space, whereas after we apply the wrapper, the actions from the wrapped actor are in the transformed Discrete space. The actor will receive move actions in the Discrete space and convert them to the Box space before passing them to the MoveActor.
Exclusive Channel Action Wrapper
The ExclusiveChannelActionWrapper works with Dict action spaces, where each subspace is to be ravelled independently and then combined so that that action channels are exclusive. The wrapping occurs in two steps. First, we use numpy’s ravel capabilities to convert each subspace to a Discrete space. Second, we combine the Discrete spaces together in such a way that imposes exclusivity among the subspaces. The exclusion happens only on the top level, so a Dict nested within a Dict will be ravelled without exclusion.
We can apply the ExclusiveChannelActionWrapper with the EncodingBasedAttackActor to force the agent to only attack one encoding per turn, like so:
import numpy as np
from abmarl.sim.gridworld.agent import AttackingAgent, HealthAgent
from abmarl.sim.gridworld.grid import Grid
from abmarl.sim.gridworld.state import PositionState, HealthState
from abmarl.sim.gridworld.actor import EncodingBasedAttackActor
from abmarl.sim.gridworld.wrapper import ExclusiveChannelActionWrapper
from gym.spaces import Dict, Discrete
agents = {
'agent0': AttackingAgent(
id='agent0',
encoding=1,
initial_position=np.array([0, 0]),
attack_range=1,
attack_strength=0.4,
attack_accuracy=1,
simultaneous_attacks=2
),
'agent1': HealthAgent(id='agent1', encoding=2, initial_position=np.array([1, 0]), initial_health=1),
'agent2': HealthAgent(id='agent2', encoding=2, initial_position=np.array([1, 1]), initial_health=1),
'agent3': HealthAgent(id='agent3', encoding=3, initial_position=np.array([0, 1]), initial_health=0.5)
}
grid = Grid(2, 2)
position_state = PositionState(agents=agents, grid=grid)
health_state = HealthState(agents=agents, grid=grid)
attack_actor = EncodingBasedAttackActor(agents=agents, grid=grid, attack_mapping={1: {2, 3}}, stacked_attacks=True)
agents['agent0'].action_space
>>> {'attack': Dict(2:Discrete(3), 3:Discrete(3))}
wrapped_attack_actor = ExclusiveChannelActionWrapper(attack_actor)
agents['agent0'].action_space
>>> {'attack': Discrete(5)}
wrapped_attack_actor.wrap_point(Dict({2: Discrete(3), 3: Discrete(3)}), 0)
>>> {2: 0, 3: 0}
wrapped_attack_actor.wrap_point(Dict({2: Discrete(3), 3: Discrete(3)}), 1)
>>> {2: 1, 3: 0}
wrapped_attack_actor.wrap_point(Dict({2: Discrete(3), 3: Discrete(3)}), 2)
>>> {2: 2, 3: 0}
wrapped_attack_actor.wrap_point(Dict({2: Discrete(3), 3: Discrete(3)}), 3)
>>> {2: 0, 3: 1}
wrapped_attack_actor.wrap_point(Dict({2: Discrete(3), 3: Discrete(3)}), 4)
>>> {2: 0, 3: 2}
With just the EncodingBasedAttackActor,
the agent’s action space is {'attack': Dict(2:Discrete(3), 3:Discrete(3))}
and there are 9 possible actions:
{2: 0, 3: 0}
{2: 0, 3: 1}
{2: 0, 3: 2}
{2: 1, 3: 0}
{2: 1, 3: 1}
{2: 1, 3: 2}
{2: 2, 3: 0}
{2: 2, 3: 1}
{2: 2, 3: 2}
When we apply the
ExclusiveChannelActionWrapper,
the action space becomes {'attack': Discrete(5)}, which is a result of the
channel exlcusion and the ravelling. When unwrapped to the original space, the
five possible actions become
{2: 0, 3: 0}
{2: 1, 3: 0}
{2: 2, 3: 0}
{2: 0, 3: 1}
{2: 0, 3: 2}
We can see that the channels are exclusive, so that the agent cannot attack both encodings in the same turn.